



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.png){kind=link}
 - Vertical.png){kind=link}
.png){kind=link}
 - Vertical.png){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.svg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.png){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Creation of Drones
Hardware
Control Unit
1. Flight Controller
1. ROM - Firmware - Code, Kalman Filters
2. Processor
3. Ports
4. SD Card
2. Companion Computers
1. Cores - VIO, SLAM
2. Software - Ease of modification, API connections, Autopilot
3. Communication to FC - ROS/MAVROS, Dronekit
4. Communication to Server - Telemetry Unit
Action Unit
1. PDB
2. ESCs
3. Motors
4. Rotors
Telemetry Unit
LTE on Raspberry Pi
Perception Unit
1. IMU - Gyroscope, Accelerometer, Magnetometer
2. GPS
3. Vision System - Camera
Power Unit
1. Battery
Skeleton Unit
1. Chassis
2. Outer body
Additional Functional Units
1. Cargo box
2. Camera wiper
Software
- Mission Control Software and API
- Autopilot System
- Vision Control System
- Weather Detection
- No-Fly-Zone Detection
- Any ATC Compliant Systems
- RTL/Safe Emergency Landing
- Logging System
Algorithms
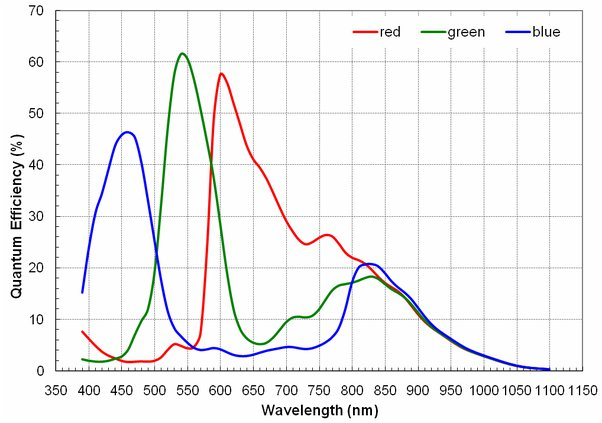
Visual Inertial Odometry
In robotics and computer vision, visual odometry (VO) is the process of determining the position and orientation of a device by analyzing the associated camera images.
There are various types of VO:
- Based on type of camera:
- Mono - Monocular Cameras
- Stereo - Stereo Camera
- Feature based and Direct method
- Feature based - Tracking by extracting feature points from an image
- Direct method - Estimation based on pixel intensity as the visual input
- There are also hybrid methods
- Visual Inertial Odometry (VIO)
If a Inertial Measurement Unit (IMU) is used along with the VO system, it is commonly called VIO.
Algorithm
1. Acquire images - single camera, stereo cameras or omnidirectional cameras
2. Image correction - apply image processing techniques for lens dirt removal, etc.
3. Feature detection
1. Use correlation to establish correspondence of two images, and no long term feature tracking. (Feature tracking ~ Motion Estimation<>Motion Vectors ~ Optical flow)
2. Feature extraction and correlation
3. Construct optical flow field (Lucas-Kanade method)
5. Check flow field vectors for potential tracking errors and remove outliers.
6. Estimation of the camera motion from the optical flow
1. Choice 1: Kalman Filter for state estimate distribution maintenance.
2. Choice 2: find the geometric and 3D properties of the features that minimize a cost function based on the re-projection error between two adjacent images. This can be done by mathematical minimization or random sampling.
7. Periodic repopulation of trackpoints to maintain coverage across the image.
An alternative to feature-based methods is the direct or appearance-based visual odometry technique which minimizes an error directly in sensor space and subsequently avoids feature matching and extraction.
Another method, coined 'visiodometry' estimates the planar roto-translations between images using Phase correlation instead of extracting features.
~Egomotion~
Egomotion is defined as the 3D motion of a camera within an environment. In computer vision, egomotion refers to estimating a camera's motion relative to a rigid scene.
The estimation of egomotion is important in autonomous robot navigation applications.